Signals are a limited form of inter-process communication used in Unix, Unix-like, and other POSIX-compliant operating systems. A signal is an asynchronous notification sent to a process or to a specific thread within the same process in order to notify it of an event that occurred. Signals have been around since the 1970s Bell Labs Unix and have been more recently specified in the POSIX standard.
Table of Contents
Kill System Call
kill - send signal to a process
int kill(pid_t pid, int sig);
The kill() system call can be used to send any signal to any process group or process.
If pid is greater than zero:
The sig signal is sent to the process whose ID is equal to pid.
If pid is zero:
The sig signal is sent to all processes whose group ID is equal
to the process group ID of the sender, and for which the process
has permission; this is a variant of killpg(2).
If pid is -1:
If the user has super-user privileges, the signal is sent to all
processes excluding system processes (with P_SYSTEM flag set),
process with ID 1 (usually init(8)), and the process sending the
signal. If the user is not the super user, the signal is sent to
all processes with the same uid as the user excluding the process
sending the signal. No error is returned if any process could be
signaled.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
Argument to Kill system call (kern_sig.c)
struct kill_args {
int pid;
int signum;
};
If process id is greater than 0 then signal has to be send to that particular process else it is either broadcast
signal or own process group etc.
// If process id > 0
if (uap->pid > 0) {
Find the process
if ((p = pfind(uap->pid)) == NULL) {
If its a zombie process
if ((p = zpfind(uap->pid)) == NULL) {
return (ESRCH);
}
}
}
Determine if we can send the signal to process
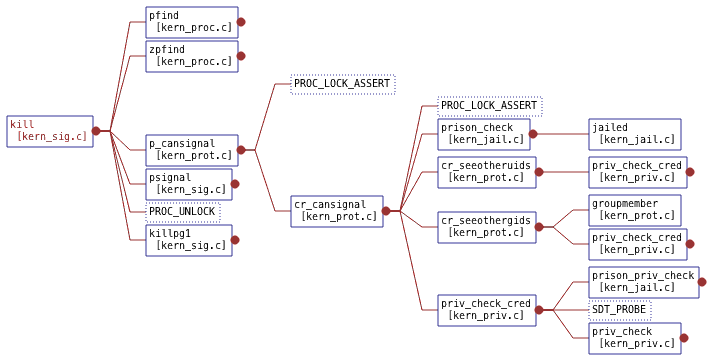
error = p_cansignal(td, p, uap->signum);
In Function p_cansignal(). This function will determine if thread can send signal to processes
cr_cansignal(struct ucred *cred, struct proc *proc, int signum)
{
Check if process to whom signal is to be send is in Jail semantics
Check the creds i.e. otherUids, otherGids
Allow only following signals, for other signals needs special privs
case 0:
case SIGKILL:
case SIGINT:
case SIGTERM:
case SIGALRM:
case SIGSTOP:
case SIGTTIN:
case SIGTTOU:
case SIGTSTP:
case SIGHUP:
case SIGUSR1:
case SIGUSR2:
break;
default:
Need priv
More priv checks
Finally yes you can send signal
}
Post Signal
If we are allowed to send signal to other process then send the signal
Now, it can happen that in multiprocessor env other process may be running or may not. So, we post the signal and when the process come to life it will receive the signal and act appropriately.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
//Post signal
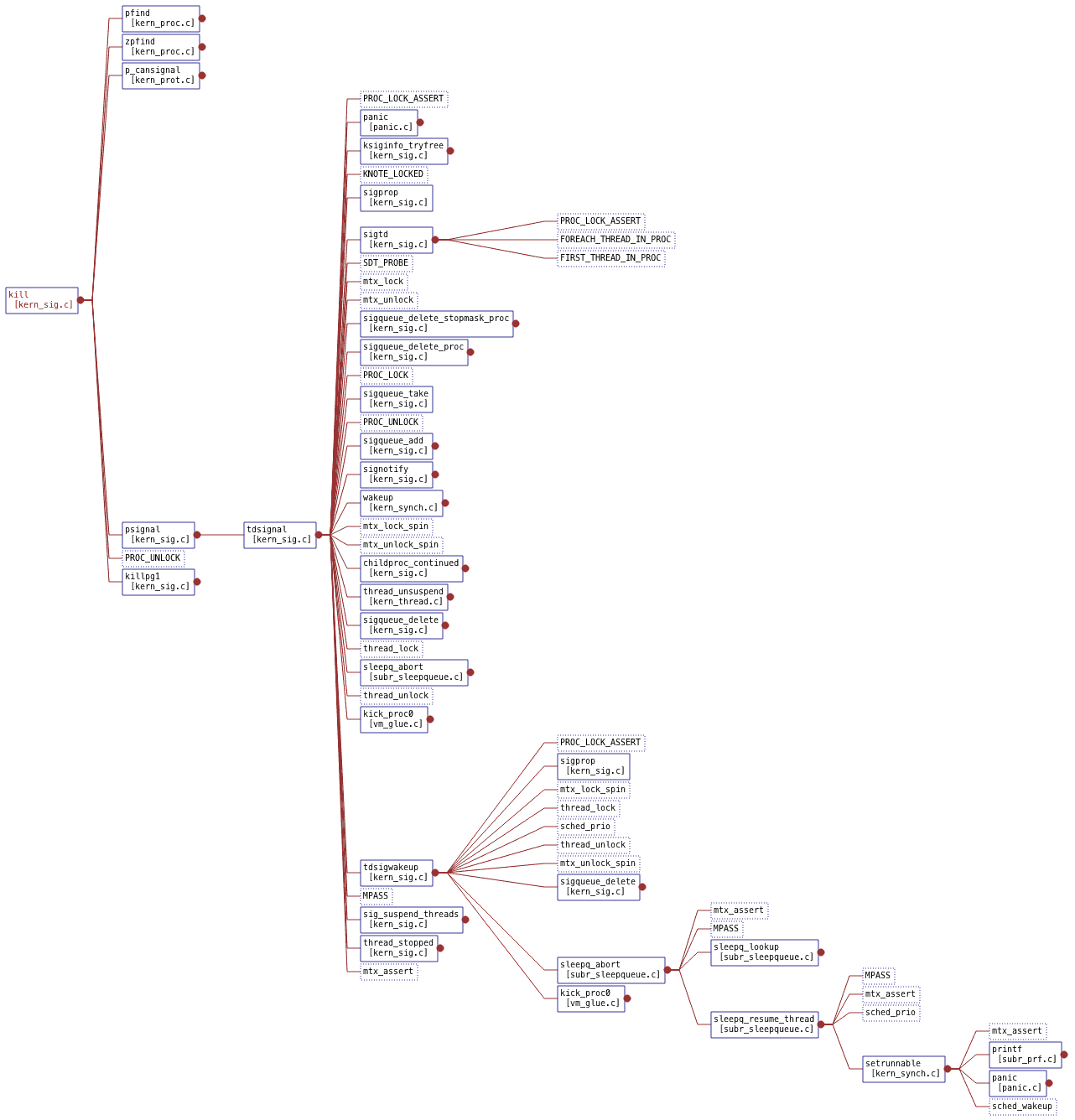
psignal(p, uap->signum);
Function tdsignal(struct proc *p, struct thread *td, int sig, ksiginfo_t *ksi)
{
Determine the property of signal
//Signal property table is in kern_sig.c
// #define SA_KILL 0x01 /* terminates process by default */
// #define SA_CORE 0x02 /* ditto and coredumps */
// #define SA_STOP 0x04 /* suspend process */
// #define SA_TTYSTOP 0x08 /* ditto, from tty */
// #define SA_IGNORE 0x10 /* ignore by default */
// #define SA_CONT 0x20 /* continue if suspended */
// #define SA_CANTMASK 0x40 /* non-maskable, catchable */
// #define SA_PROC 0x80 /* deliverable to any thread */
//static int sigproptbl[NSIG]
Post Signal to thread in a process
td = sigtd(p, sig, prop);
Function sigtd(struct proc *p, int sig, int prop) {
Check if we are current process
For each thread in process check if thread is registered for signal handling
If we can’t find any thread to post signal then just pick the first thread in process
return the thread pointer
}
So far, we have signal to post and the thread pointer where to post
There is a signal queue. So get the pointer to signal queue.
There are 2 signal queues
1. Signal queue for process
2. Signal queue for thread
if (SIGISMEMBER(td->td_sigmask, sig))
sigqueue = &p->p_sigqueue;
else
sigqueue = &td->td_sigqueue;
Check if the signal we will be sending is in our ignore list. If it is in our ignore list then do not
process further and drop it
We will now check the preferences/flags marked in the target thread regarding signals
It can happen that thread have masked all the signals right now i.e. thread may be processing some signal
and want all other signals to hold until it finishes processing
if (SIGISMEMBER(td->td_sigmask, sig))
action = SIG_HOLD;
If signal is register to be catch
else if (SIGISMEMBER(ps->ps_sigcatch, sig))
action = SIG_CATCH;
Check the property of Signal
If property of signal is to continue then go through signal queue and delete the signal which will stop
the execution
if (prop & SA_CONT)
sigqueue_delete_stopmask_proc(p);
else if (prop & SA_STOP) {
// Stop running the process
Finally, Add the signal to the signal queue
ret = sigqueue_add(sigqueue, sig, ksi);
Notify thread that Signal has been posted
signotify(td);
In function signotify() we check that what are all the pending signals for the thread and for which
signal handler have not masked that means target thread signal handler wants to accept that signal.
Then we enable the flags so that the target thread can to running state if suspended and when awake
knows that some signal is posted for the thread
td->td_flags |= TDF_NEEDSIGCHK | TDF_ASTPENDING;
...
If target process is in sleep state or sleep interruptible state then wake it up
tdsigwakeup(td, sig, action, intrval);
Function tdsigwakeup()
{
bump up the thread priority
sched_prio(td, PUSER);
If thread is in the sleep queue and interruptible
then wakeup the thread
wakeup_swapper = sleepq_abort(td, intrval);
Function sleepq_abort(struct thread *td, int intrval) {
...
...
Enable thread flags
td->td_intrval = intrval;
td->td_flags |= TDF_SLEEPABORT;
...
get the thread wait channel
wchan = td->td_wchan;
Sleep queue of wait channel where thread resides currently when sleeping
sq = sleepq_lookup(wchan);
//Wake up the thread
return (sleepq_resume_thread(sq, td, 0));
Whole idea is that there is a hash of all the wait channel
We have already for the wait channel and now there are all the processes
waiting on this wait channel
//Removes a thread from a sleep queue and makes it runnable
Function sleepq_resume_thread(struct sleepqueue *sq, struct thread *td, int pri) {
...
...
Remove process/thread from wait channel
TAILQ_REMOVE(&sq->sq_blocked[td->td_sqqueue], td, td_slpq);
...
...
Clear the sleeping flag and set it runnable
if (TD_IS_SLEEPING(td)) {
TD_CLR_SLEEPING(td);
return (setrunnable(td));
Function setrunnable(struct thread *td)
{
...
...
sched_wakeup(td);
Function sched_wakeup(struct thread *td) { ====> sched_ule.c
This function let schedular know that thread needs to resume
...
...
sched_add()
}
} // end setrunnable
} // end sleepq_resume_thread
} // end sleepq_resume_thread
} // end sleepq_abort
} //end tdsigwakeup()
} // end tdsignal
Signal Delivery
So far, in above processing we have loaded the target process to to the run queue and eventually our process run time slice will over and now another process will run.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
The switch of process will happen at
Function mi_switch
// The machine independent parts of context switching.
Function mi_switch(int flags, struct thread *newtd)
{
...
...
// Schedular come into the picture to switch the thread
sched_switch(td, newtd, flags);
Function sched_switch(struct thread *td, struct thread *newtd, int flags)
{
Save information related to thread before context switching
cpuid = PCPU_GET(cpuid);
tdq = TDQ_CPU(cpuid);
ts = td->td_sched;
mtx = td->td_lock;
ts->ts_rltick = ticks;
td->td_lastcpu = td->td_oncpu;
td->td_oncpu = NOCPU;
td->td_flags &= ~TDF_NEEDRESCHED;
td->td_owepreempt = 0;
tdq->tdq_switchcnt++;
...
...
choose new thread to run
newtd = choosethread();
Function choosethread() {
...
td = sched_choose();
Function sched_choose() {
Choose next high priority thread to run from the same CPU
tdq = TDQ_SELF();
td = tdq_choose(tdq);
Function tdq_choose(struct tdq *tdq) {
Pick the thread from realtime thread queue
td = runq_choose(&tdq->tdq_realtime);
If its NULL, then pick from Timshare queue
td = runq_choose_from(&tdq->tdq_timeshare, tdq->tdq_ridx);
If its NULL, then pick from Idle queue
td = runq_choose(&tdq->tdq_idle);
In function runq_choose we simply go to queue and get the
first item from the queue
} //end tdq_choose
...
return the thread
} //end sched_choose
} //end choosethread
So, newtd is the newthread we choose to run
This function will switch the threads and newtd will be running after this function call
This function is a assembly level code
cpu_switch(td, newtd, mtx);
} //end sched_switch
} //end mi_switch
Now we have target thread running.
When we were posting the signal we enabled the flag TDF_ASTPENDING in function
signotify(td);
In function signotify() we check that what are all the pending signals for the thread and for which signal
handler have not masked that means target thread signal handler wants to accept that signal.
Then we enable the flags so that the target thread can to running state if suspended and when awake
knows that some signal is posted for the thread
td->td_flags |= TDF_NEEDSIGCHK | TDF_ASTPENDING;
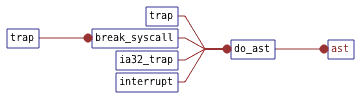
Since, this flag is enable when the target process comes into like it will check this flag and if it is enable
then it will call function AST (Asynchronous software trap)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
Function ast(struct trapframe *framep)
{
...
...
...
Check if any signals are posted
if (flags & TDF_NEEDSIGCHK) {
PROC_LOCK(p);
mtx_lock(&p->p_sigacts->ps_mtx);
This function will get the signal posted and which is unmasked
We will process all the pending signals one-by-one
while ((sig = cursig(td)) != 0)
postsig(sig);
mtx_unlock(&p->p_sigacts->ps_mtx);
PROC_UNLOCK(p);
Function cursig(struct thread *td) {
...
Return if there is signal to process or 0 when nothing to process
return (SIGPENDING(td) ? issignal(td) : 0);
Function issignal(td) {
Find any pending signal
sigpending = td->td_sigqueue.sq_signals;
Get first pending signal
sig = sig_ffs(&sigpending);
Handle special cases of SIGSTOP or SIGCONT
Get properties of signal
prop = sigprop(sig);
Handle other cases i.e. Default Signal, Ignore Signal etc
return signal
} //end of issignal(td)
} //end of cursig(struct thread *td)
// This function take action for specified signal
Function postsig(sig) {
register struct proc *p = td->td_proc;
...
...
Get signal action
action = ps->ps_sigact[_SIG_IDX(sig)];
Now we will check action and process accordingly
//Default action which is kill the process
if (action == SIG_DFL) {
sigexit(td, sig);
Function sigexit(td, sig) {
...
exit1(td, W_EXITCODE(0, sig));
}
} else {
...
get signal mask
returnmask = td->td_sigmask;
...
// Send signal to signal handler
// In process structure
// struct sysentvec *p_sysent; /* (b) Syscall dispatch info. */
(*p->p_sysent->sv_sendsig)(action, &ksi, &returnmask);
// i386/machdep.c
Function sendsig(sig_t catcher, ksiginfo_t *ksi, sigset_t *mask) {
struct sigframe sf;
...
When stack is context switched it will save the stack frame,
register contents etc
Get the stack frame pointer of thread
regs = td->td_frame;
...
Make a copy of stack frame because we will be changing the
frame to handle the signal.
Once the signal is handled and the processing is done this
stack frame will be brought back.
bcopy(regs, &sf.sf_uc.uc_mcontext.mc_fs, sizeof(*regs));
Allocate space for signal handler context and put that in stack frame
sp = (char *)regs->tf_esp - sizeof(struct sigframe);
...
Build argument list for signal handler
sf.sf_signum = sig;
Pointer to signal context
sf.sf_ucontext = (register_t)&sfp->sf_uc;
We are in kernel space currently, we will be going to user space soon
and we want the signal catcher code to be executed in user space
We are assigning the address of catcher function to be called from user space
sf.sf_ahu.sf_action = (__siginfohandler_t *)catcher;
...
...
Copy the signal frame to user's stack
if (copyout(&sf, sfp, sizeof(*sfp)) != 0) {
sigexit(td, SIGILL);
}
Stack frame pointer we got above "regs" will copy sigtramp() to
instruction pointer. So, after returning from here we think
we will return from ast() and go to user code back but
instead now we will be going to trampoline code.
regs->tf_eip = PS_STRINGS - szfreebsd4_sigcode;
} // end sendsig
}
} //end postsig()
}
} //end of ast()
In i386/locore.s code for signal trampoline in user space
NON_GPROF_ENTRY(sigcode)
calll *SIGF_HANDLER(%esp)
leal SIGF_UC(%esp),%eax /* get ucontext */
pushl %eax
...
...
movl $SYS_sigreturn,%eax
Function sigreturn()
Function sigreturn(td, uap)
{
regs = td->td_frame;
...
...
lot of snaity checking
...
...
bcopy(&ucp->uc_mcontext.mc_fs, regs, sizeof(*regs));
...
}